
استپ موتور چیست ؟
استپ موتور نوعی از موتور dc است که به صورت گسسته حرکت میکند. درون استپ موتور چندین سیم پیچ وجود دارد که در گروه هایی به نام فاز قرار داده شده اند. با عبور الکتریسیته از هر یک از این فازها، موتور با سرعت یک گام در واحد زمانی به چرخش در می آید.
با کنترل کردن گام های استپ موتور توسط یک کامپیوتر، میتوان کنترل سرعت و موقعیت بسیار دقیقی به دست آورد. به همین دلیل استپر موتورها گزینه هایی مناسب برای استفاده در پروژه هایی هستند که نیاز به کنترل حرکت دقیق دارند. استپ موتورها در اندازه ها و انواع مختلف با مشخصات الکتریکی متفاوت برای کارهای صنعتی مختلفی وجود دارند که بر حسب نیاز متیوان یکی از آن ها را انتخاب کرد.
اجزا تشکیل دهنده استپ موتور
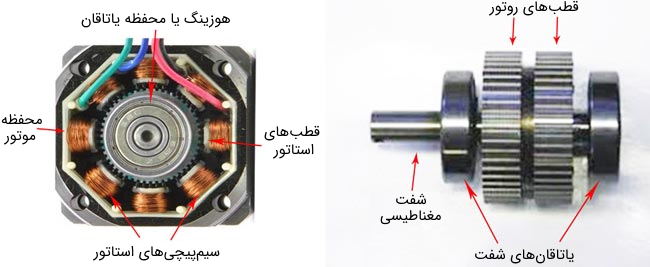
استپ موتور از قسمت های استاتور، روتور و قاب های سر و انتها تشکیل شده است.
استاتور :
در قسمت استاتور تعدادی سیم پیچ با هم گروه بندی شده اند. مثلا در استپ موتور دو فاز دو گروه سیم پیچ میبینید که از داخل با هم اتصال دارند که نهایتا چهار سیم از آن ها بیرو ن آمده که دو به دو به هر کدام به گروه سیم چیپ ها متصل اند. در استپ موتور سه فاز شش سیم خروجی خواهید داشت و در استپ موتور 5 فاز 10 سیم خروجی. البته این نکته باید گفته شود که در استپ موتورها گاها این ده سیم یا شش سیم از داخل با یکدیگر سری یا موازی میشوند و بیرون می آیند.
روتور :
روتور معمولا بسته به اینکه گشتاور استپ موتور و طول استپ موتور چقدر است تعدا دطبقات کمتر یا بیشتری دارد. مثلا در یک استپ موتور که 4 طبقه است اگر میخواهد طول بیشتری داشته باشد میتواند تا 8 طبقه شود که در نتیجه آن گشتاور استپ موتور بیشتر میشود یا میتواند طول آن به 2 طبقه کاهش پیدا کند که در آن صورت نیز گشتاور استپ موتور نصف خواهد شد.
قاب استپ موتور :
در تمامی استپ موتور ها بر خلاف باقی موتورها که بوش و بلبرینگ وجود دارد در استپ موتور در دو طرف فقط بلبرینگ میبینید. علت عمر بالای استپ موتور هم همین موضوع است یعنی اثری از ذغال نمیبینید که بخواهد تمام شود یا اینکه بوشی وجود ندارد که بوش بخواهد جا بیندازد و خراب شود و عملکرد استپ موتور با مشکل مواجه شود.
میکرواستپ در درایور استپ موتور به چه معناست؟
گام پیش فرض استپ موتورها به طور عمومی یا 1.8 درجه است (دو فازها)، یا 1.2 درجه (سه فازها) و یا 0.75 درجه (پنج فازها) و این به این معنی است که با ولتاژدهی فاز بعدی نسبت به فاز قبلی، این گام توسط استپ موتور طی خواهد شد.
میکرواستپ در درایور استپ موتور چگونه عمل می کند؟
درایورهای میکرواستپ بجای آنکه ولتاژ را به صورت صفر و یک به فازهای متوالی موتور تحویل دهند، آن را تقسیم نموده و به عنوان مثال در میکرواستپ با تقسیمات 16، در مرحله اول 1/16 ولتاژ را به فاز اول و 15/16 آن را به فاز دوم تحویل می دهند. در مرحله دوم 2/16 را به فاز اول و 14/16 را به فاز دوم. و به این ترتیب رزولوشن حرکت موتور را ریزتر و دقیقتر می کنند.
چه تأثیری دارد؟
این امر باعث می شود دقت حرکت استپ موتور بالا رفته و در عین حال لرزش استپ موتور بمقدار زیادی کنترل شود.
چه معایبی دارد؟
در میکرو استپ های بالا، باعث کاهش گشتاور موتور شده و احتمال گم کردن پالس نیز زیاد می شود.
مقایسه انواع استپ موتور از لحاظ مشخصات فنی
منظور از استپ موتور 2 فاز ، استپ موتور 3 فاز و استپ موتور 5 فاز چیست؟ چه تفاوتهایی با هم دارند؟ موارد استفاده هر کدام کجاست ؟
مقایسه انواع استپ موتور از لحاظ مشخصات فنی :
1- سرعت کارکرد استپ موتور:
5 فاز > 3 فاز > 2 فاز
2- دقت کارکرد استپ موتور:
5 فاز> 3 فاز > 2 فاز
3- صرفه اقتصادی استپ موتورها :
2 فاز > 3 فاز > 5 فاز
4- موجودی بازار :
2 فاز > 5 فاز > 3 فاز
مقایسه انواع استپ موتور از لحاظ کاربرد
5- استپ موتورهای 3 فاز بیشتر در حرکتهای با رفت و برگشت زیاد و سریع به کار می روند.
6- استپ موتورهای 5 فاز در حرکتهای با سرعت و دقت بالا به کار گرفته می شوند، تا جاییکه یک استپ موتور 5 فاز با درایور میکرواستپ می تواند دقتی تقریبا معادل یک سرو موتور 17 بیتی داشته باشد.
7- استپ موتورهای 5 فاز با درایور معمولی (Full/Half) لرزش بسیار کمی دارند و جز در موارد با دقت زیاد، نیازی به درایور میکرو استپ ندارند.
8- استپ موتور های دو فاز با درایور معمولی (Full/Half) لرزش زیادی دارند و می بایست برای حذف لرزش آنها از روشهای مکانیکی استفاده نمود.
به صورت کلی، اگر در پروژه های خود از سرو موتور (+گیربکس) استفاده می کنید، ولی به سرعت بالایی نیاز ندارید (کمتر از 500RPM) و گشتاور مورد نیازتان نیز کمتر از 30N.M است، می توانید جهت کاهش هزینه های خود به استپ موتور فکر کنید.
مزایا و معایب استفاده از استپ موتور
مزایای استپ موتور : با هزینه خیلی کم پروژه های کنترل موقعیت میتوان انجام داد. ابعاد کوچکی دارند و در ابعاد کوچک گشتاور زیادی میتوانند اعمال کنند. سایزبندی های مختلف دارند و بسته به پروژه های مختلف میتوان از آن ها استفاده کرد. درایورهای آن ها درایور های ساده ای است و کار با آن ها ساده است.
معایب استپ موتور :
در سرعت های خیلی بالا نمیتوانند کار بکنند. اگر در پروژه اینرسی بار زیاد باشد احتمال اینکه خطایی رخ دهد وجود دارد و آن خطا باید به نوعی اصلاح شود به این صورت که درسیستم کالیبراسیون قرار داد یا انیکه انکودری داشته باشید تا خطاها را تشخیص دهد.
مقایسه موتور استپر 2 فاز و 5 فاز
در این مقاله آموزشی، قصد داریم دو موتور استپر پرکاربرد 2 فاز و 5 فاز را با یکدیگر مقایسه کنیم. این گزارش بر اساس تجربه ما با کار کردن با این دو موتور و همچنین مقالات ارائه شده در این مورد جمع آوری شده است. بدین منظور شرکت ربات سازان مقایسه کاملی بین این دو موتور انجام داده تا بحث درباره این موضوع بسیار مهم را تکمیل کند. این راهنما تفاوت های اساسی بین این دو موتور که بر روی عملکردشان تاثیر گذار است را به طور کامل پوشش می دهد. تفاوت هایی همچون رزولوشن، ارتعاشات، گشتاور و دقت.
چه تفاوتهایی بین 2 فاز و 5 فاز وجود دارد؟
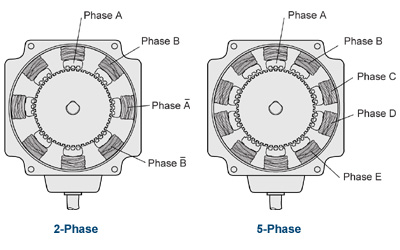
دو تفاوت اصلی بین موتور دوفاز و پنج فاز وجود دارد. اولین تفاوت مکانیکی است. یک موتور استپر اساسا شامل دو قسمت استاتور و روتور است. در موتور 2 فاز، استاتور از هشت قطب مغناطیسی با دندانه های کوچک ساخته شده است. در صورتی که استاتور موتورهای پنج فاز از 10 قطب مغناطیسی تشکیل شده است. قطب ها در استاتور یک سیم پیچ میباشد.
تفاوت دوم بین موتور دو فاز و پنج فاز، تعداد فازهای آن میباشد. یک موتور دو فاز دارای دو فاز ( فاز A و فاز B) است. در حالیکه موتور پنج فاز شامل پنج فاز است. ضرورتا، تعداد فاز بیانگر تعداد متفاوت ترکیب قطب ها می باشد که به طور متوالی انرژی دار میشوند تا روتور دوران کند. فاکتورهایی وجود دارند که بر روی عملکرد موتور استپر تاثیر گذار می باشند. بعلاوه برای راه اندازی موتورهای استپر تعدادی راه وجود دارد. راه اندازی موجی، راه اندازی کامل، راه اندازی نیم پله و راه اندازی زیر پله عمومی ترین راه ها برای راه اندازی این موتورها هستند.
رزولوشن
از نظر ساختاری، موتور دو فاز و پنج فاز با یکدیگر تفاوتی ندارند. روتور در هر دوی آنها دارای 50 دندانه است. تفاوت در اینجاست که موتور 5 فاز دارای 10 قطب است ( برای هر فاز 2 تا)، در نتیجه تنها 1/10 گام دندانه ها روتور حرکت میکند. در صورتی که در موتور دو فاز، 1/4 گام دندانه حرکت می کند (هشت قطب، چهار فاز).
این باعث می شود که موتور استپر بعد از 200 گام، یک دور کامل دوران کند (1.8 درجه برای هر گام). در صورتی که در موتور پنج فاز نیاز به 500 گام است ( 0.72 درجه برای هر گام). این دقت بیشتر از ذات طراحی موتورهای پنج فاز است. زمانی که موتور های پنج فاز به صورت میکرو استپ درایو میشوند، میتوانیم به گامهایی در حدود 0.00288 درجه است. دقت مکانیکی موتورهای پنج فاز و دو فاز در حدود 0.05 درجه است.
ارتعاش
به علت کوچکتر بودن زاویه دوران موتور 5 فاز، 0.72 درجه در هر گام، نسبت به زاویه دوران دوفاز، 1.8 درجه در هر گام، ارتعاش در موتور 5 فاز به مراتب کمتر از موتور دو فاز است. شکل زیر ارتعاش ناشی از یک موتور استپر دوفاز و پنج فاز را مقایسه کرده است. همانطور که مشاهده می کنید ارتعاش در پنج فاز بسیار کمتر است.

گشتاور
اگر چه تفاوت چندانی بین گشتاروهای خروجی موتور دو فاز و سه فاز وجود ندارد، اما موتور پنج فاز دارای گشتاور قابل استفاده بیشتری است. با راه اندازی نیم پله و راه اندازی میکرو استپ موتورهای 5 فاز، گتاور به میزان 10 درصد افزایش می یابد. علت آن را میتوان در آن دانست که فازهای بیشتری انرژی دار میشوند.اما گشتاور به میزان 40 درصد در موتورهای دو فاز زمانیکه نیم پله یا به صورت میکو استپ درایو میشوند، از دست می دهند. با آنکه راههایی برای جبران این کاهش وجود دارد.
زمانی که استاتور انرژی دار میشود، یک مغناطیس الکتریکی به وجود می آید که موجب ایجاد شار مغناطییسی در روتور می شود. این شار مغناطیسی به دو بردار تصویر (بردار عمودی و مماسی) می شود. گشتاور زمانی به وجود می آید که مولفه مماسی حضور داشته باشد. وجود شار مغناطیسی در شکل نشان داده شده است.
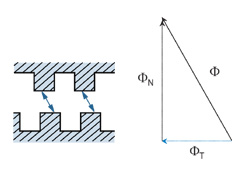
در شکل 1، دندانه روتور مستقیما در مقابل دندانه روتور قرار دارد و شار تنها مولفه عمودی دارد. بنابراین گشتاوری تولید نمی شود. با جابه جا شدن دندانه روتور از دندانه استاتور در شکل های 2، 3 و 4 موتور تولید گشتاور می کند. این گشتاور منفی است. زیرا گشتاور سعی می کند که دندانه ها را به موقعیت پایدار خود بکشد. در شکل 5، شار به طور کاملا مساوی بین داندانه استاتور ایجاد می شود و گشتاور تولیدی صفر خواهد شد. در شکل های 6، 7 و 8 گشتاور تولیدی مثبت است. زیرا دندانه روتور به سمت دندانه بعدی استاتور سوق داده می شود. سرانجام، دوباره دندانه روتور در راستای دندانه استاتور قرار می گیرد (شکل 1).
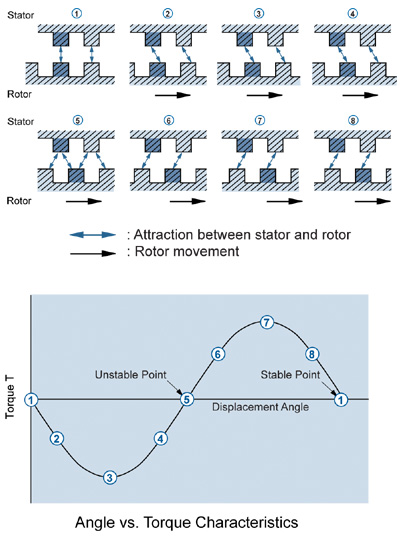
همانطور که در شکل مشاهده می کنید هر فاز موتور گشتاور سینوسی شکلی را ایجاد می کند. اختلاف بین قله و دره را گشتاور ناهموار یا همان ریپل گشتاوری می نامند. به علت آنکه فازهای بیشتری در موتور 5 فاز برای تولید گشتاور مشارکت می کنند، بنابراین ریپل گشتاور در این موتورها از موتورهای دوفاز کمتر است. اختلاف بین قله و دره در موتورهای دوفاز در حدود 29% ، در صورتی که در موتورهای 5 فاز در حدود 5% می باشد. از آنجایی که این ریپل تاثیر مستقیمی بر روی ارتعاش دارد، بنابراین موتورهای 5 فاز نرم تر و آرام تر کار می کنند.


دقت/ تکرار پذیری
دقت دارای دو مولفه مکانیکی و الکتریکی است. خطای الکتریکی زمانی رخ می دهد که فازها از حالت بالانس خود خارج شوند. برای مثال، مقاومت سیم پیچ در حدود ±10% است.در این صورت ممکن است موتوری که دارای توان 10W است، توان یکی از فازها 9.2W و توان دیگری در حدود 10.6W باشد. این اختلاف باعث می شود که روتور بیشتر به سمت یک فار تمایل داشته باشد.
درباره خطای مکانیکی مولفه های زیادی می توان وجود داشته باشد. برای مثال می توان به شکل دندانه ها اشاره کرد. اگر چه شکل یک دندانه در موتور بایستی مربعی شکل باشد، در طول زمان ممکن است که سر دندانه ها به سمت گردی پیش بروند. این باعث می شود که شار به صورت مستقیم انتقال داده شود، به علت گردی شدن دندانه این اتفاق نیافتد. این فاکتورها بر دقت موتور تاثیر بسزایی دارند.
در حالت راه اندازی کامل، موتور دوفاز در هر چهار گام، وضعیتش تکرار می شود، اما در موتور 5 فاز در هر 10 گام این اتفاق رخ می دهد. هر خطای الکتریکی ناشی از نابالانسی در هر چهار گام برای موتور دوفاز و هر 10 گام برای موتور 5 فاز خنثی می شود. اما خطای مکانیکی همچنان باقی می ماند. بنابراین خطای مکانیکی از اهمیت بیشتری برخوردار است.

روش های راه اندازی
چندین روش برای راه اندازی هر دو موتور دو فاز و پنج فاز وجود دارد. در این جا به صورت خلاصه با مفهوم راه اندازی کامل و میکرو استپ آشنا خواهد شد.
راه اندازی کامل موتور 2 فاز
در راه اندازی کامل این موتور هر دو فاز A و B انرژی دار می شوند و بین مثبت و منفی سوییچ می کنند تا دوران رخ دهد.
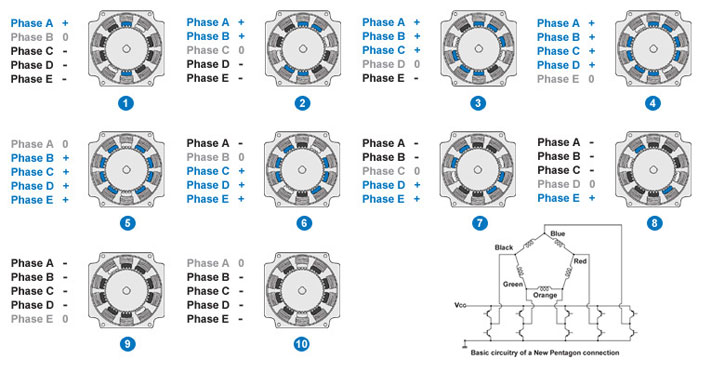
راه اندازی کامل موتور 5 فاز
در اینجا چهار فاز با یک ترتیب خاص که در شکل زیر مشاهده می کنید، انرژی دار می شوند.
میکرو استپ
به طور کلی نکته این راه اندازی بر این اساس است که زاویه گام رو با کم کردن جریان در یک فاز و افزایش جریان در فاز بعدی را کوچک می کند. این باعث می شود که موتور در گام های کوچکتری دوران کند.
شکل زیر اساس میکرو استپ را نمایش می دهد.
شکل 1- فاز A دارای 100% جریان است و روتور روبروی این فاز قرار می گیرد.
شکل2- جریان در فاز A تا 75% کاهش می یابد، و جریان در B تا 25% افزایش می یابد.
شکل3- جریان در هر دو فاز A و B ، 50% است. بنابراین روتور در وسط دو فاز قرار می گیرد.
شکل 4- فاز A در حدود 25% و جریان در فاز B در حدود 75% است. بنابراین روتور به فاز B نزدیکتر می شود.
شکل5- فاز A خاموش شده و فاز B دارای 100% جریان است. بنابراین روتور دقیقا رویروی فاز B قرار می گیرد. ب
به خاطر داشته باشید با راه اندازی میکرواستپ، نه تنها دقت افزایش می یاید، بلکه عمکرد موتور نیز نرم تر شده و ارتعاشات ناشی از دوران موتور کاهش می یابد.

نتیجه