

انواع موتور DC را میتوان به ۴ گروه اصلی موتور جاروبکدار، براشلس، سروو موتور و موتور پلهای تقسیم کرد.
موتورهای DC یا موتورهای جریان مستقیم، اداوت الکترومکانیکی هستند که از اثر متقابل میدانهای مغناطیسی و رساناها استفاده میکنند و انرژی الکتریکی را به انرژی مکانیکی چرخشی تبدیل میکنند. انواع مختلف موتورهای DC از نظر ساختمان و کاربرد با یکدیگر متفاوت هستند.
موتورهای الکتریکی DC، از چرخش زاویهای پیوسته بهره میبرند و میتوانند پمپ ها ، فنها، کمپرسورها و چرخها را به حرکت در آورند. همانند موتورهای DC گردان متداول، موتورهای خطی نیز موجود هستند که این موتورها میتوانند حرکت خطی پیوسته را تولید کنند.
در حالت کلی میتوان گفت دو طبقهبندی اساسی برای انواع موتورها وجود دارد:
موتورهای AC و موتورهای DC.
موتورهای AC، معمولا در کاربردهای صنعتی تک فاز یا چند فاز توان بالا مورد استفاده قرار میگیرند که در آنها به سرعت و گشتاور چرخشی ثابتی برای کنترل بارهای بزرگ مانند فنها و پمپها نیاز است. در ادامه قصد داریم به بررسی فقط نوع دیگر از این موتورها، یعنی موتورهای DC بپردازیم که در بسیاری از مدارات الکترونیکی، کنترل موقعیت، میکروپروسسور، PIC و رباتیک مورد استفاده قرار میگیرند.
انواع موتور DC
موتور DC یا موتور جریان مستقیم (Direct Current Motor) را میتوان متداولترین محرک (Actuator) برای تولید یک حرکت پیوسته دانست که حرکت خطی یا چرخشی آن به سادگی کنترل میشود و به همین دلیل برای استفاده در کاربردهای کنترل سرعت، کنترل نوع سروو (Servo) و موقعیت انتخابی بسیار ایدهآل محسوب میشود. یک موتور DC از دو قسمت تشکیل شده است، قسمت اول که استاتور (Stator) نام دارد و بخش ثابت موتور DC در نظر گرفته میشود و قسمت دوم که روتور (Rotor) نام دارد و قسمت گردان موتور است.
در نتیجه میتوان گفت انواع موتور DC به سه گروه زیر تقسیم میشوند:
موتور دارای جاروبک (Brushed Motor):
این نوع از موتورها، با استفاده از عبور جریان الکتریکی از کموتاتور (Commutator) و جاروبکهای کربنی، میدان مغناطیسی را در روتور سیمپیچی شده تولید میکنند و به همین دلیل به آنها موتورهای جاروبکدار یا دارای جاروبک گفته میشود. میدان مغناطیسی استاتور را میتوان یا با استفاده از مغناطیسهای دائم (Permanent Magnets) و یا با استفاده از سیمپیچی میدان استاتور تولید کرد. معمولا موتورهای DC جاروبکدار ارزان قیمت و کوچک هستند و کنترل آنها بسیار آسان است.
موتور بدون جاروبک یا براشلس (Brushless Motor):
این نوع از موتورها، با بهرهگیری از مغناطیس دائمهای متصل به روتور، یک میدان مغناطیسی در روتور به وجود میآورند و در واقع عمل کموتاسیون در آنها به صورت الکتریکی انجام میشود. موتورهای بدون جاروبک یا براشلس معمولا دارای اندازه کوچکتری هستند، اما نسبت به موتورهای جاروبکدار قیمت بالاتری دارند؛ زیرا در استاتور آنها از سنسورهای اثر هال برای تولید میدان دوار استاتور استفاده شده است. در عوض، این موتورها مشخصهگشتاور-سرعت بهتر، راندمان بالاتر و نیز طول عمر بیشتری نسبت به موتورهای جاروبکدار معادل خود دارند.
موتور سروو (Servo Motor):
این نوع از موتورها را میتوان نوعی از موتورهای DC جاروبکدار دانست که در آنها از فرمی از کنترل فیدبک موقعیت، متصل به شفت روتور، بهره گرفته شده است. این اتصالات توسط کنترلکننده نوعPWM یا مدولاسیون پختای باند کنترل میشوند و عمدتا در سیستمهای کنترل موقعیت و مدلهای کنترل رادیویی مورد استفاده قرار میگیرند.
موتورهای DC عادی، دارای مشخصه خطی سرعت چرخش با گشتاور چرخشی هستند. سرعت چرخش توسط ولتاژ DC اعمال شده به موتور و گشتاور چرخشی توسط جریان سیمپیچهای موتور تعیین میشوند. سرعت چرخش موتورهای DC از چند دور بر دقیقه (Revolutions per Minute) تا چند هزار دور بر دقیقه در تغییر است و همین امر آنها را برای کاربردهای الکترونیکی، مکاترونیکی، اتوماسیون و رباتیک مناسب میسازد. از طریق اتصال این موتورها به چرخدندهها (Gearboxes) میتوان سرعت گردش آنها را کاهش داد، در حالی که هم زمان گشتاور خروجی موتور در سرعتهای بالا، افزایش مییابد.
موتور DC دارای جاروبک
موتورهای DC دارای جاروبک متداول، اساسا از دو بخش تشکیل میشوند. یک بخش که بدنه ثابت موتور است و استاتور نام دارد و قسمت داخلی موتور که روتور یا آرمیچر نام دارد و همیشه در گردش است. قسمت روتور نهایتا باعث ایجاد حرکت شفت موتور میشود.
سیمپیچیهای استاتور در موتور، یک مدار الکترومغناطیسی محسوب میشوند. این مدار از سیمپیچهای الکتریکی تشکیل شده است که با آرایش دایرهای به هم متصل شدهاند. سیمپیچهای الکتریکی به صورت متوالی قطب شمال و سپس قطب جنوب مغناطیسی را ایجاد میکنند. به این ترتیب، یک سیستم میدان مغناطیسی ثابت برای گردش به وجود میآید که این موضوع دقیقا برعکس موتورهای AC است که در آنها، میدان استاتور با استفاده از فرکانس اعمالی، به صورت پیوسته در چرخش است. جریانی که از این سیمپیچیهای میدان میگذرد با نام جریان میدان موتور (Motor Field Current) شناخته میشود.
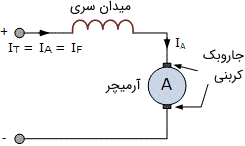
سیمپیچهای الکتریکی که میدان استاتور را به وجود میآورند، میتوانند به صورت سری، موازی و یا ترکیبی از هر دو به آرمیچر موتور متصل شوند. اگر سیمپیچها با آرایش ترکیب سری و موازی به آرمیچر متصل شوند، به آن کمپوند (Compound) میگویند. در یک موتور DC با سیمپیچی سری، سیمپیچیهای میدان استاتور به صورت سری به آرمیچیر موتور متصل شده است. نمایی از یک موتور DC با سیمپیچ میدان سری را در تصویر زیر مشاهده میکنید.
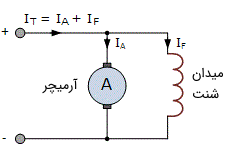
به طریق مشابه، یک موتور DC با سیمپیچ میدان موازی، موتوری است که در آن سیمپیچهای میدان به صورت موازی به آرمیچر موتور متصل شده باشند. نمایی از یک موتور DC با سیم پیچ میدان موازی در تصویر زیر نمایش داده شده است.
روتور یا آرمیچر در یک ماشین DC از رساناهای حامل جریان تشکیل شده است که یک طرف آنها به قطعهی مسی متصل است که به لحاظ الکتریکی ایزوله است. این قطعه، کموتاتور (Commutator) نام دارد و باعث میشود یک اتصال الکتریکی بین جاروبکهای کربنی و منبع تغذیه خارجی موتور برقرار شود و موتور به چرخش درآید. به همین دلیل است که به این موتورها، موتورهای جاروبکدار گفته میشود.
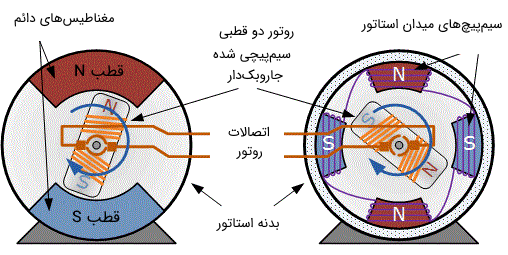
میدان الکترومغناطیسی به وجود آمده توسط روتور تلاش میکند تا خود را با میدان ثابت استاتور هماهنگ کند و موتور را در جهت محور خود بچرخاند، اما به دلیل تاخیر کموتاسیون، این هماهنگی انجام نمیگیرد و همین تاخیر است که مبنای چرخش روتور را فراهم میآورد. سرعت چرخش موتور به شدت میدان مغناطیسی روتور و نیز مقدار ولتاژ اعمالی به موتور بستگی دارد، به صورتی که هر چه این دو مقدار بالاتر باشند، سرعت چرخش بالاتر خواهد بود. در تصویر زیر نمایی از دو نوع موتور دارای جاروبک DC را میتوان مشاهده کرد. یکی از این موتورها، دارای دو قطب است و میدان مغناطیسی استاتور توسط مغناطیس دائمهای آن به وجود میآید. اما موتور دوم دارای استاتور چهار قطب است و میدان مغناطیسی آن توسط سیمپیچهای میدان استاتور ایجاد میشود.
موتورهای DC مغناطیس دائم جاروبکدار یا PMDC، معمولا از موتورهای همتای خود، یعنی موتور DC جاروبکدار استاتور سیمپیچی شده کوچکتر و ارزانتر هستند؛ زیرا این موتورها سیمپیچی میدان ندارند. در موتورهای مغناطیس دائم، سیمپیچهای میدان، با مغناطیسهایی از جنس آهن و کبالت که دارای میدان مغناطیسی بسیار بزرگی هستند، جایگزین میشوند.
استفاده از مغناطیسهای دائم، به دلیل میدان مغناطیسی همیشگی و معمولا قویتر، به موتور DC مشخصه گشتاور سرعت خطیتری را نسبت به موتور DC استاتور سیمپیچی شده میدهد و به همین دلیل، این موتورها برای کاربردهای رباتیکی و سروو بسیار مناسبتر هستند.
اگرچه موتورهای DC جاروبکدار، دارای راندمان بالا و ارزان قیمت هستند، اما مشکلی که این نوع از موتورها دارند این است که تحت شرایط بار سنگین، بین دو سطح کموتاتور و جاروبکهای کربنی، جرقه (Spark) به وجود میآید. این جرقهها منجر به تولید حرارت داخلی، عمر کوتاه موتور و نویزهای الکتریکی میشوند. ایجاد جرقه میتواند منجر به آسیب دیدن ادوات و کلیدهای نیمهرسانا مانند ترانزیستورهای ماسفت شود. برای غلبه بر این مشکل، موتورهای DC بدون جاروبک یا براشلس توسعه یافتند.
موتورهای DC براشلس
موتورهای براشلس یا بدون جاروبک ، بسیار شبیه به موتورهای DC مغناطیس دائم هستند، اما برای جلوگیری از ایجاد جرقه در کموتاسیون، از هیچ جاروبکی در این نوع موتورها استفاده نشده است. بنابراین، گرمای بسیار کمی در موتور ایجاد میشود و عمر موتور افزایش مییابد. در موتورهای براشلس نیاز به کموتاسیون مکانیکی حذف شده است و در عوض موتور به یک مدار پیچیدهتر به عنوان درایور احتیاج دارد. در این موتور، میدان مغناطیسی روتور، یک مغناطیس دائم است که همیشه با میدان استاتور سنکرون بوده و همین امر منجر به کنترل دقیقتر سرعت و گشتاور موتور میشود.
بنابراین میتوان گفت ساختار یک موتور براشلس بسیار شبیه به یک موتور AC است و میتوان آن را یک موتور سنکرون محسوب کرد. اما عیب اصلی موتورهای براشلس این است که نسبت به همتای جاروبکدار خود قیمت بالاتری دارند. همچنین کنترل موتورهای براشلس نسبت به موتورهای جاروبکدار بسیار پیچیدهتر است. در شکل زیر نمایی از یک موتور DC براشلس دیده میشود.

برای کنترل موتورهای براشلس، به ابزارهای جدیدی برای تشخیص موقعیت زاویهای روتور و یا قطبهای مغناطیسی احتیاج داریم تا سیگنالهای فیدبک مورد نیاز برای کنترل ادوات کلیدزنی نیمه رسانا تولید شوند. متداولترین سنسور موقعیت، سنسور اثر هال (Hall Effect Sensor) نام دارد، البته برخی از موتورها از سنسورهای نوری نیز استفاده میکنند.
با استفاده از سنسورهای اثر هال، پلاریته الکترومغناطیسها از طریق مدار درایو (کنترل) موتور تغییر داده میشود. بنابراین میتوان موتور را به سادگی با یک سیگنال کلاک دیجیتال سنکرون کرد و یک کنترل سرعت بسیار دقیق را برای موتور فراهم کرد. موتورهای بدون جاروبک را میتوان به نحوی ایجاد کرد که یا یک روتور مغناطیس دائم خارجی و یک استاتور الکترومغناطیسی داخلی داشته باشند و یا یک روتور مغناطیس دائم داخلی و یک استاتور الکترومغناطیس خارجی در آنها وجود داشته باشد.
موتورهای براشلس نسبت به موتورهای جاروبکدار دارای راندمان بالاتر، قابلیت اعتماد بیشتر، نویز الکتریکی پایین و کنترل سرعت بهتر هستند. البته یکی از مهمترین مزیتهای این موتورها این است که کموتاسیون مکانیکی در آنها حذف شده است و به همین دلیل جرقه در این موتورها اتفاق نمیافتد و طول عمر آنها بالاتر میرود. اما همان طور که اشاره کردیم، قیمت این موتورها بالاتر و کنترل آنها نیز پیچیدهتر است.
موتورهای سروو
موتورهای DC نوع سروو در کاربردهای جلقه بسته مورد استفاده قرر میگیرند. در این کاربردها، موقعیت شفت خروجی موتور به مدار کنترل موتور بازگردانده میشود. ادوات متداول برای فیدبک موقعیت، مانند ریزولورها (Resolvers)، انکودرها و پتانسیومترها در مدلهای کنترل رادیویی مانند هواپیما و قایقها مورد استفاده قرار میگیرند.
یک سروو موتور معمولا دارایچرخ دنده های داخلی برای کاهش سرعت است و به همین دلیل میتواند گشتاور بالایی را مستقیما منتقل کند. شفت خارجی یک سروو موتور، به دلیل اتصال چرخ دنده و ادوات فیدبک موقعیت، بر خلاف شفت موتور DC عادی، به صورت آزاد چرخش نمیکند. بلوک دیاگرام یک موتور DC سروو در تصویر زیر نشان داده شده است.
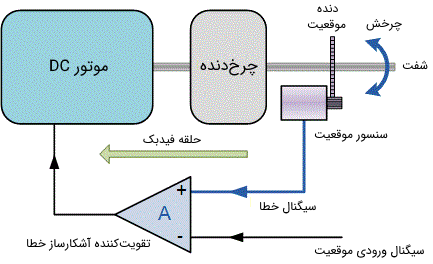
سروو موتور از یک موتور DC به همراه ادوات فیدبک موقعیت و تجهیزاتی برای تصحیح خطا تشکیل شده است. سرعت یا موقعیت، متناسب با سیگنال ورودی موقعیت یا سیگنال مرجع اعمال شده به وسیله، کنترل میشوند.تقویت کننده آشکارساز خطا (Error Detection Amplifier) بر سیگنال ورودی نظارت میکند و آن را با سیگنال فیدبک از شفت موتور مقایسه میکند و تصمیم میگیرد که آیا شفت خروجی موتور در موقعیت اشتباهی قرار گرفته است یا خیر. اگر موقعیت شفت موتور، منجر به تولید سیگنال خطا شود، کنترلکننده سیگنال مناسب را برای تصحیح خطا ایجاد میکند و متناسب با مقدار خطا، سرعت موتور را یا افزایش میدهد و یا آن را کم میکند. چنین پاسخی به سیگنال فیدبک وقعیت در موتور سروو را سیستم حلقه بسته (Closed Loop System) مینامند.
علاوه بر کاربردهای صنعتی و بزرگ، سروو موتورها در کاربردهای رباتیک و مدلهای کنترل از راه دور کوچک نیز مورد استفاده قرار میگیرند. موتورهای سروو به این دلیل در بازه گستردهای از کاربردها مورد استفاده قرار میگیرند که قادر هستند ۱۸۰ درجه در هر دو جهت چرخش کنند و در نتیجه برای کنترل دقیق موقعیت انتخاب بسیار ایدهآلی محسوب میشوند. با این حال، موتورهای سروو نوع RC نمیتوانند مانند موتورهای DC عادی به صورت پیوسته در سرعتهای بالا بچرخند و برای این منظور باید اصلاحات خاصی روی آنها انجام گیرد. در شکل زیر نمایی از یک موتور RC دیده می شود.

یک موتور سروو از ادوات مختلفی در یک پکیج تشکیل شده است که عبارتند از: موتور، چرخ دنده، ادوات فیدبک و تجهیزات تصحیح خطا برای کنترل موقعیت، سرعت و جهت چرخش. این موتورها به صورت گسترده در مدلهای کوچک و رباتیک مورد استفاده قرار میگیرند؛ زیرا به سادگی توسط سه سیم تغذیه، زمین و سیگنال کنترلی قابل کنترل شدن هستند.
موتور DC پلهای
مانند موتورهای DC بالا ، موتورهای پله ای نیز وجود دارند که محرکهای الکترومکانیکی محسوب میشوند. این موتورها یک سیگنال ورودی دیجیتال پالسی را به حرکت مکانیکی (افزایشی) گسسته تبدیل میکنند و به صورت گسترده در کاربردهای کنترل صنعتی مورد استفاده قرار میگیرند. یک موتور پلهای در واقع نوعی از موتورهای براشلس سنکرون به حساب میآید که در آن از کموتاسیون مکانیکی و براشهای کربنی استفاده نشده است. اما در این موتورها، یک روتور متشکل از تعداد زیادی دندانههای مغناطیس دائم و یک استاتور سیمپیچی شده وجود دارد.
همان طور که از نام این موتور مشخص است، موتور پلهای مانند موتورهای عادی، به صورت پیوسته دوران نمیکند، بلکه این موتور در پلههای گسسته و افزایشی حرکت میکند که زاویه هر چرخش به تعداد قطبهای استاتور و دندانههای روتور موتور پلهای بستگی دارد. در تصویر زیر نمایی از یک موتور پلهای دیده میشود.
موتور پلهای
به دلیل پلههای گسسته در حرکت، موتور پلهای میتواند در هر لحظه کسر محدودی از چرخش، مثلا ۱٫۸، ۳٫۶ یا ۷٫۵ درجه را انجام دهد. بنابراین، اگر فرضا یک موتور پلهای، یک دوران کامل خود یعنی ۳۶۰ درجه را در ۱۰۰ پله انجام دهد. آنگاه، زاویه پلههای موتور برابر با
3.6=360/100
یا ۳٫۶ درجه در هر پله است. این مقدار را زاویه گام (Step Angle) در موتور پلهای میگویند.
در حالت کلی، سه نوع اساسی از موتورهای پلهای وجود دارد. موتورهای رلوکتانس متغیر (Variable Reluctance)، موتورهای مغناطیس دائم (Permanent Magnet) و موتورهای هیبرید (Hybrid) سه گروه مختلف از موتورهای پلهای هستند که نوع هیبرید ترکیبی از دو نوع دیگر است. یک موتور پلهای برای کاربردهایی که کنترل دقیق موقعیت و تکرارپذیری با سرعت بالا مورد نیاز هستند، بسیار مناسب است. به عبارت دیگر، در این موتورها راهاندازی، توقف، حرکت معکوس و کنترل سرعت با پاسخ سریع انجام میگیرد. ویژگی مهم دیگر در موتورهای پلهای این است که زمانی که به موقعیت مورد نظر برسد، میتواند بار را به صورت پایدار (Steady) نگه دارد.
معمولا موتورهای پلهای دارای یک روتور داخلی با تعداد زیادی دندانههای مغناطیس دائم هستند و تعدادی دندانههای الکترومغناطیسی نیز روی استاتور وجود دارند. الکترومغناطیسهای روی استاتور به صورت متوالی و یک در میان، قطبی (Polarized) و غیر قطبی (Depolarized) شدهاند و به همین دلیل است که موتور در هر لحظه یک پله دوران میکند. موتورهای پلهای مدرن چند قطبی-چند دندانهای میتوانند دقتی در حدود ۰٫۹ درجه در هر چرخش (۴۰۰ پالس در هر چرخش) داشته باشند و در سیستمهای کنترل موقعیت بسیار دقیق مانند رباتیک، هد مغناطیسی در هارد دیسک درایوها و پرینترها مورد استفاده قرار میگیرند. متداولترین موتورهای پلهای مورد استفاده، دارای ۲۰۰ پله در هر چرخش هستند. این موتورها، یک روتور با ۵۰ دندانه، یک استاتور ۴ فاز و زاویه گام ۱٫۸ درجه دارند.