

انکودرها از جهات مختلف به دسته بندی حای مختلفی تقسیم می شوند
از لحاظ نوع ساختمان
-انکودر خطی (Linear encoder)
-انکدر چرخشی و یا دورانی (Rotary encoder)
از لحاظ عملکرد و ساختمان داخلی
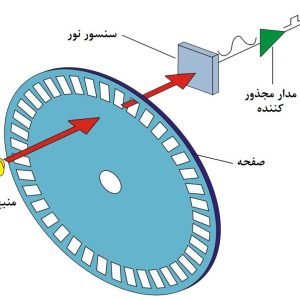
-نوری (Optical encoder)
-مغناطیسی (Magnetic encoder)
-خازنی (Capacitive Encoder)
از لحاظ نوع خروجی سیگنال
-انکودر نسبی (Relative Encoder): در این تکنیک یک گیرنده و فرستنده ی مادون قرمز در دو طرف کد دیسک قرار میگیرد ، در این نوع از انکودرها صرفاً موقعیت نسبی جسم چرخنده نسبت به موقعیت اولیه اندازه گیری می شود و نمی توان جهت چرخش را مشخص کرد.
-انکودر افزایشی (Incremental Encoder): در انکودر (Encoder) افزایشی از دو فرستنده و گیرنده مادون قرمز در دو طرف کد دیسک با فاصله مشخص استفاده می شود. بنابراین با چرخشِ چرخ ما، دو پالس خروجی داریم که با یکدیگر اختلاف فاز دارند و براساس آن میتوان جهت چرخش را نیز مشخص نمود.
یکی از معایب انکودر افزایشی این است که تنها مقدار تغییرات حرکت را مشخص میکند و قادر به تعیین موقعیت نیست. دقت انکودر افزایشی به تعداد سوراخ های آن وابسته است به این صورت که هر چه تعداد این سوراخ ها بیشتر باشند، دقت انکودر نیز بیشتر است. به عنوان مثال اگر در یک انکودر تعداد 360 سوراخ را داشته باشیم، از آنجا که کل صفحه 360 درجه است، در نتیجه انکودر مورد نظر از دقتی برابر با 1 درجه برخوردار است. در واقع دقت انکودر افزایشی از رابطه زیر محاسبه میشود:
تعداد پالس/ 360
خروجی انکودرهای افزایشی
انکودرهای افزایشی چند نوع خروجی مختلف دارند:
– لاین درایور (Line Driver)
– NPN open collector
– (Totem pole (push pull
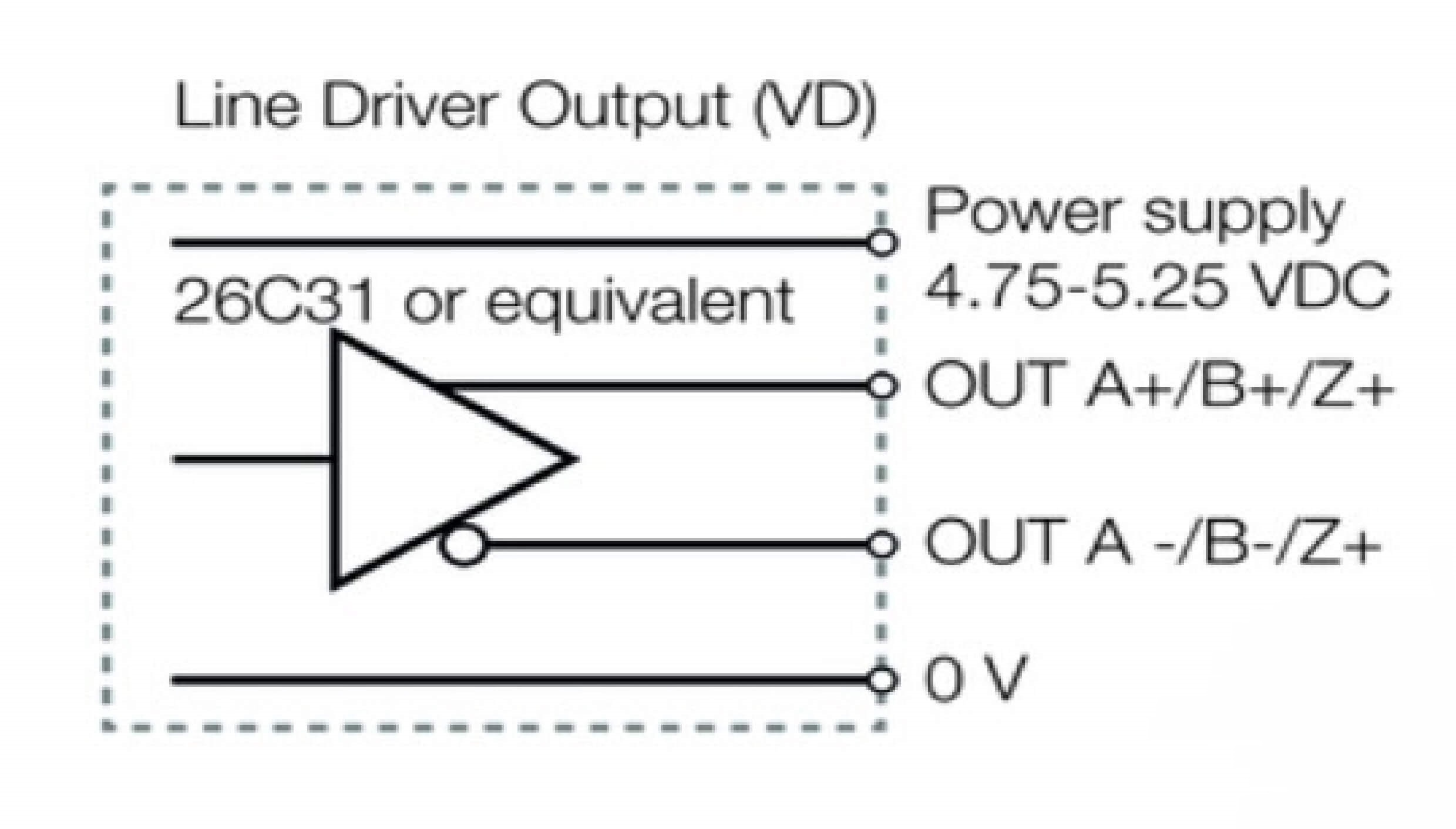
خروجی لاین درایور
این خروجی یک سیگنال دیفرانسیلی است و برای هر کانال دو سیم خروجی مجزا نیاز دارد. آرایش متداول سیم ها A′، A، B′، B و … است. وقتی کانال A روشن است، در واقع ولتاژ مثبتی بین A و ′A وجود دارد. همچنین زمانی که کانال A خاموش است، اختلاف ولتاژ منفی بین A و ′A وجود دارد. اندازه اختلاف ولتاژ بزرگتر از ۲.۵ V خواهد بود. این در مورد کانال های B و Z نیز صدق می کند. خروجی های لاین درایور سیگنالی با کیفیت و نویز کم ایجاد می کند.
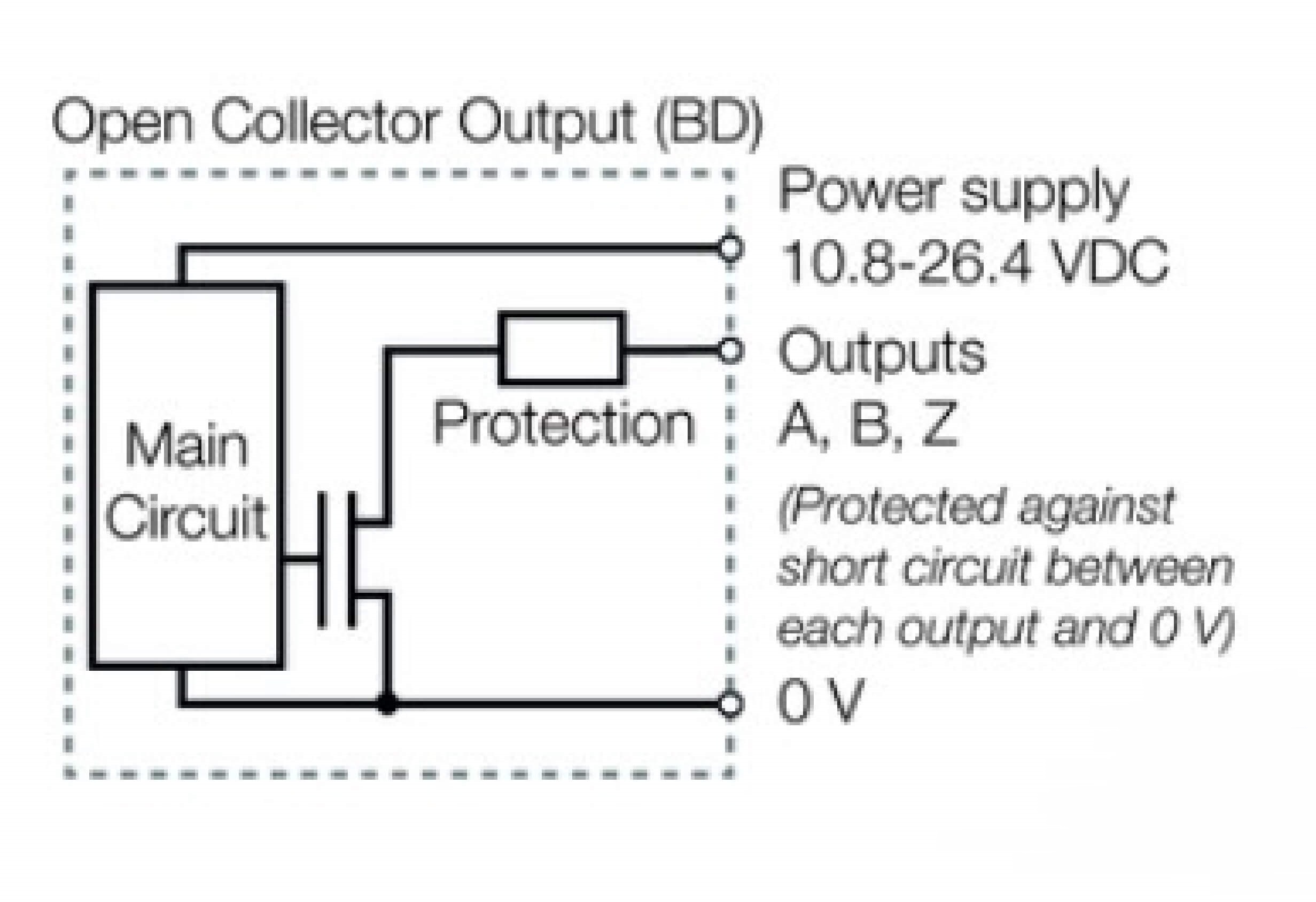
خروجی NPN open collector
این نوع خروجی از ورودی های (PLC (PNP جریان می کشد. یک انکودر open collector دارای سیم های A، B و Z و ۰ ولت است. این نوع از انکودرها گستره وسیعی از ولتاژ را می پذیرند.
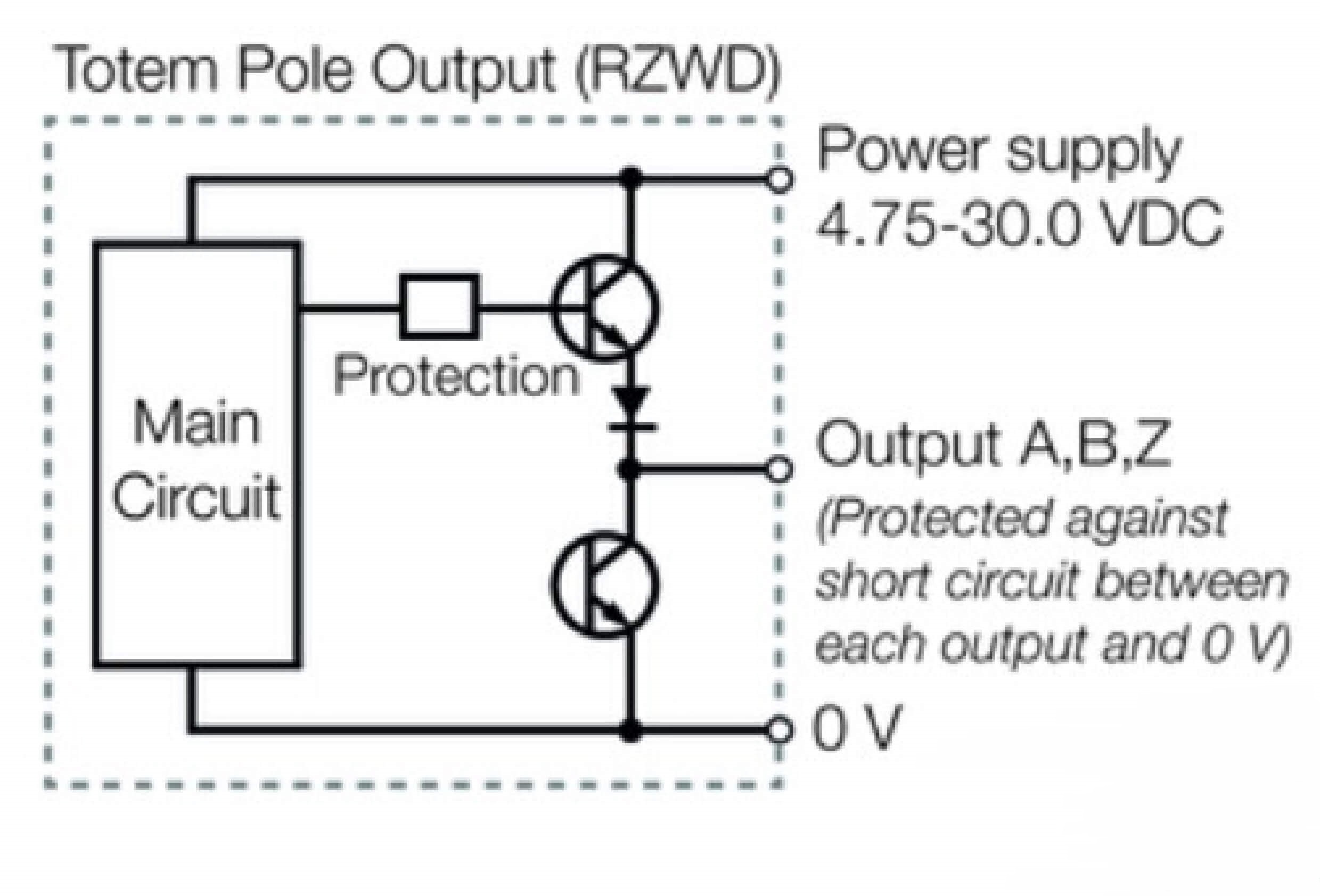
خروجی توتم پل (Totem pole)
خروجی Totem pole مداری خاص است که می تواند به PLC جریان دهد یا جریان کشد. نکته مهم در مورد مدار این انکودر، استفاده از یک جفت ترانزیستور است. هنگامی که یکی از ترانزیستورها روشن است، دیگری خاموش است.
اگر PLC جریان تزریق کند (ورودی PNP)، انکودر توتم پل می تواند از طریق ترانزیستور پایینی جریان بکشد. چنانچه PLC جریان بکشد (ورودی NPN)، انکودر توتم پل از طریق ترانزیستور بالایی جریان را تأمین کند.
-انکودر مطلق (Absolute Encoder): در این نوع انکودر (Encoder) علاوه بر حرکت، تعیین موقعیت نیز انجام میدهد. نحوه کارکرد این نوع انکودر به این صورت است که درون انکودر مطلق یک صفحه دوار قرار دارد که این صفحه متشکل از چندین شبکه است و هر کدام از این شبکه ها به چندین قطاع تقسیم شده اند. به هر یک از قطاع های شبکه ها یک بیت گفته میشود. به هر کدام از شبکه ها یک الگوی رنگی منحصر بفرد اختصاص داده میشود. با توجه به اینکه شاخص روی چه الگوی رنگی قرار گرفته، انکودر مطلق تشخیص میدهد که موقعیت فعلی در چه زاویه ای قرار دارد.
با توجه به نوع ساختار، انکودر مطلق در مقایسه با انکودر افزایشی از دقت بیشتری برخوردار است. دقت انکودر مطلق با بیت بیان میشود و از فرمول زیر محاسبه میشود:
2 به توان تعداد بیت / 360
نکته: در انکودر مطلق به تعداد بیت ها سیم وجود دارد.
انکودر کالسکه
عملکرد انکودر کالسکه در واقع مشابه با عملکرد انکودر افزایشی است با این تفاوت که دو عدد چرخ بر روی آن سوار شده است. این چرخ ها بر روی سطحی که حرکت میکند قرار میگیرند و با حرکت سطح، چرخ ها نیز میچرخند و حرکت را به انکودر منتقل میکنند.

کاربرد انکودر کالسکه در صنایعی مانند صنایع کاشی سازی است که مثلا هر به ازای هر یک متر، قرار است سنگ برش بخورد. باید به این نکته توجه کرد که دقت انکودر کالسکه ای بر خلاف انکودر افزایشی، بر اساس پالس نیست بلکه بر اساس میلی متر، سانتی متر و یا متر است. مثلا انکودر کالسکه ای با دقت یک میلیمتر، به ازای هر یک میلیمتری که طی میشود یک پالس می اندازد.
اندازه گیری حرکت خطی
اندازه گیری حرکت خطی توسط این سه ابزار انجام میشود: انکودر خطی، خط کش اهمی، خط کش مغناطیسی. در این ابزارها مشخصه ای به نام کورس وجود دارد و بیانگر حداکثر طولی است که دستگاه قادر به اندازه گیری آن است. به عنوان مثال در یک انکودر خطی با کورس 30، انکودر مذکور میتواند حداکثر 30 سانتی متر حرکت خطی را اندازه گیری کند.
انکودر خطی
عملکرد انکودر خطی که به آن خط کش پالسی یا خط کش دیجیتالی نیز گفته میشود کاملا مشابه با انکودر افزایشی است با این تفاوت که صفحه به کار رفته در آن به جای اینکه گرد باشد به صورت یک خط مستقیم است. در این نوع انکودر، دقت اندازه گیری را فاصله بین سوراخ ها تعیین میکند. به عنوان مثال اگر فاصله بین سوراخ ها 0.1 میلیمتر باشد، دقت این انکودر هم برابر با 0.1 میلیمتر است، یعنی به ازاری هر 0.1 میلیمتر حرکت، انکودر یک پالس را ثبت میکند.

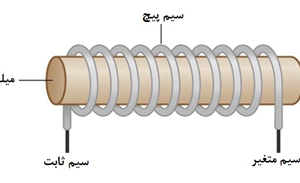
خط کش اهمی (مقاومت متغیر)
ساختار خط کش اهمی مانند رئوستا است. در واقع خط کش اهمی یک نوع مقاومت متغیر است که مقدار حرکت را از طریق اندازه گیری تغییرات مقدار مقاومت محاسبه میکند به این صورت که وقتی سیم متغیر جابجا شده و به جلو یا عقب میرود، مقاومت سیم پیچ تغییر میکند و از طریق این تغییرات میتوان طول حرکت را اندازه گیری کرد. مثلا اگر به مقدار 5 اهم تغییر در مقدار مقاومت داشته باشیم، این به معنی این است که به میزان 10 سانتی متر جابجا شده ایم. به علت ساده بودن ساختار، این خط کش اهمی به لحاظ قیمت، ارزان تر از انکودر خطی است.
خط کش مغناطیسی
خط کش مغناطیسی در واقع یک میله است که به چندین قطعه تقسیم شده که هر قطعه قطب N یا S آهنربا است. در روبروی این میله، یک میله مغناطیسی دیگر نیز در حال حرکت است. با حرکت میله دوم بر روی میله اول، وقتی قطب های همنام در مقابل هم قرار گیرند، به دلیل خاصیت مغاناطیسی، میله ها یکدیگر را دفع میکنند و وقتی قطب های غیرهمنام روبروی هم قرار بگیرند میله ها یکدیگر را جذب میکنند. بر اساس تعداد دفع و جذب های انجام شده مقدار حرکت اندازه گیری میشود.

این نوع خط کش کاربردهای متنوعی دارد. مثلا در یک دستگاه تزریق پلاستیک که قرار است کاور موبایل تولید کند، دستگاه تزریق باید با دقت خیلی زیاد و در حد صدم میلیمتر حرکت کند زیرا اگر دستگاه یک مقدار بیشتر جلو برود، کاور موبایل تولیدی ضخیم شده و برای موبایل تنگ میشود و اگر هم کمتر از مقدار تعیین شده حرکت کند، کاور نازک تر شده و برای موبایل گشاد میشود بنابراین به دقت بسیار بالایی نایز است تا اندازه ها دقیقا به مقدار تعیین شده در بیایند، خط کش مغناطیسی این مقدار را اندازه میگیرد و آن را گزارش میدهد.
انکودرها در انواع یک سیگنال، 2سیگنال، 3سیگنال و 6سیگنال ساخته می شوند.
نوع 6سیگنال آن تشکیل شده از سیگنال های A و B و Z است. سه سیگنال بعدی سیگنال های متمم A و B و Z هستند که این سیگنال ها دقیقاً مخالف سیگنال های A و B و Z عمل می کنند. به این ترتیب که وقتی سیگنال A در سطح منطقی یک قرار دارد، سیگنال متمم A در سطح منطقی صفر قرار می گیرد.
عملکرد سیگنال های “B و “Z نیز همانند سیگنال “A است.
کاربرد انکودر (Encoder) چیست؟
انکودر (Encoder) معمولا در سیستمهای اتوماسیون در قسمتی نصب میشوند که بتوانند از خروجی فیدبک گرفته و برای کنترلر ارسال کنند.
انکودر پارامتر های زیر را برای سیستم کنترلی مشخص کند:
- اندازه گیری سرعت
- اندازه گیری و کنترل موقعیت
- جهت چرخش شفت